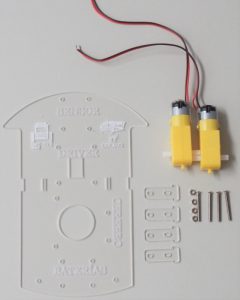
Lista de materiales
- Chasis
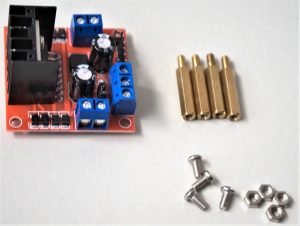
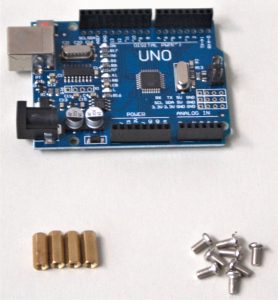
- Paquete de tornillos
- 2 motores
- 2 ruedas
- 1 rueda loca
- Sensor ultrasónico
- Base del sensor ultrasónico
- Driver de los motores
- Arduino
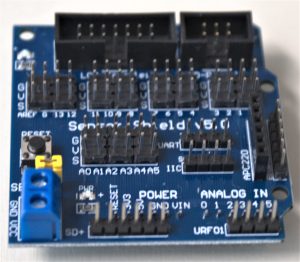
- Placa de sensores
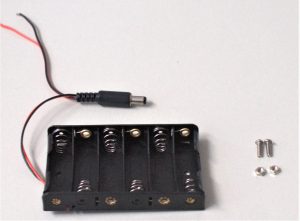
- Holder para baterías
- Switch
Herramientas
- Desatornillador
- Alicate
Manual de uso
1. Verificar que todos los materiales estén completos
2. Realizar el montaje de los motores sobre el chasis, tomando en cuenta que el chasis debe estar desde la vista inferior.

3. Realizar la adaptación de la rueda loca
4. Montar la rueda loca


5. Montaje del switch (desde la parte inferior)

6. Posteriormente instalar las ruedas amarillas en los ejes de los motores

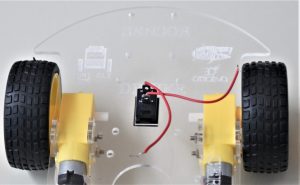
7. Dar la vuelta al chasis
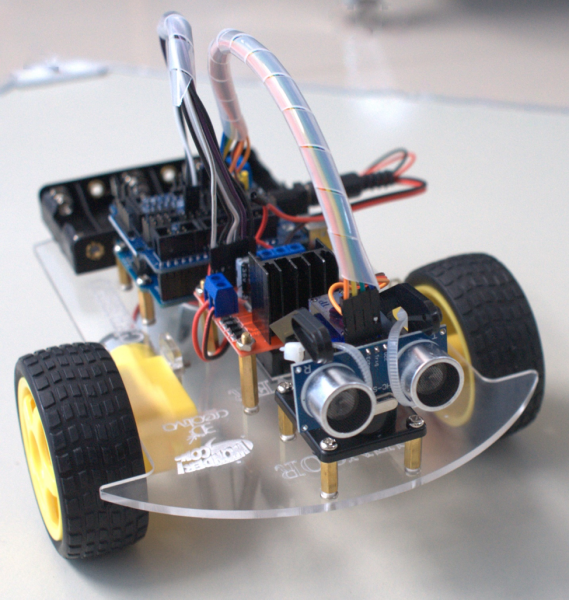
8. Realizar el montaje del sensor ultrasónico en su base, posteriormente realizar el montaje en el chasis



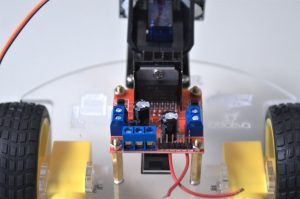
9. Realizar la adaptación del driver de los motores y el montaje en el chasis
10. Realizar la adaptación del Arduino y el montaje de la placa de sensores sobre el mismo, realizar el montaje en el chasis
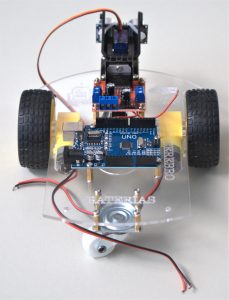
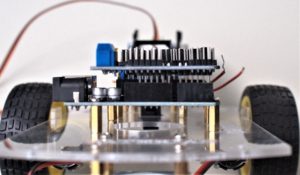
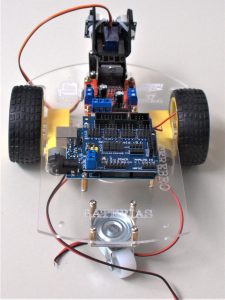
11. Realizar el montaje del holder de las baterías
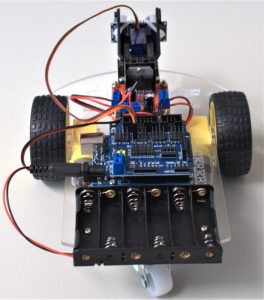
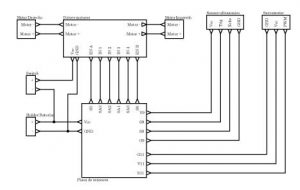
12. Realizar el cableado tal y como se detalla en el cableado eléctrico

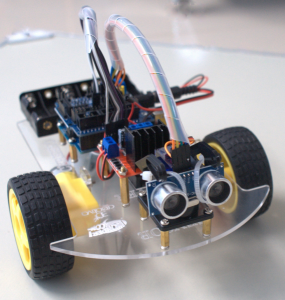
Diagrama Eléctrico
Programación
https://www.dropbox.com/s/wcqiq6ou2y3tnbb/firsttry.ino?dl=0